Imagine correr em uma trilha de cimento e, de repente, pela areia seca. Apenas para se manter em pé, você teria que diminuir a velocidade e mudar a forma como corre. Da mesma forma, um robô ambulante teria que mudar sua marcha para lidar com superfícies diferentes.
Geralmente, nós, humanos, e a maioria dos robôs, só podemos mudar a forma como corremos. Mas e se pudéssemos também mudar a forma de nossos corpos para correr o mais rápido e seguro possível em qualquer superfície?
Gostaríamos de contar com robôs para tarefas difíceis e perigosas, desde a inspeção de reatores nucleares que falharam até a exploração espacial. Para essas tarefas, um corpo estático pode limitar a adaptabilidade do robô. Um corpo que muda de forma pode fazer a diferença entre o sucesso e o fracasso nesses ambientes inesperados. Melhor ainda, um robô que muda de forma pode aprender a melhor forma corporal para diferentes ambientes e se adaptar a novos ambientes à medida que os encontra.
Em colaboração com a Universidade de Oslo, essa ideia foi testada com um robô de quatro patas que adapta seu corpo para andar em novas superfícies conforme as vê, tendo um desempenho melhor do que um robô de corpo estático. A pesquisa foi publicada na Nature Machine Intelligence.
Um quadrúpede que muda de forma
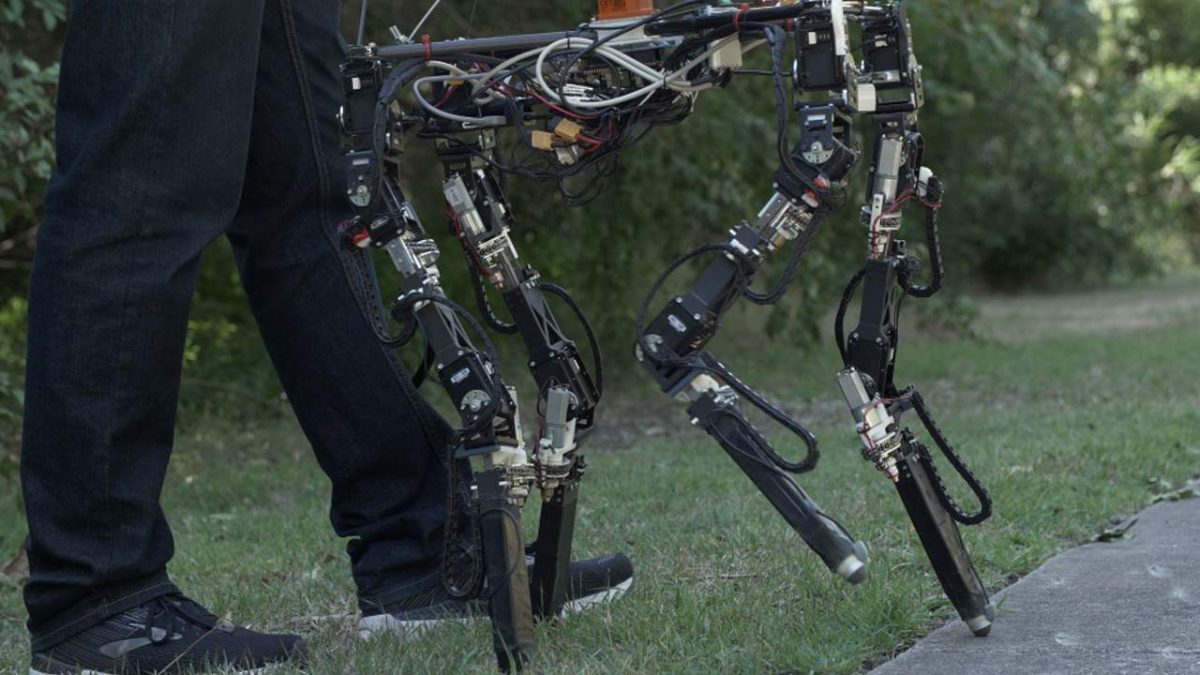
DyRET, o Robô Dinâmico para Testes Corpóreos, ou “o animal” na língua norueguesa de seu criador, Tønnes Nygaard, foi projetado para explorar a ideia de um robô que muda de forma. Cada uma das quatro pernas do DyRET tem duas seções telescópicas, de modo que pode alterar o comprimento de sua coxa ou tíbia. Os ajustes são feitos por motores embutidos nas pernas e os comprimentos podem ser alterados automaticamente enquanto o robô está operando.
Os motores podem alterar a altura do DyRET em cerca de 20%, de 60 cm a 73 cm de altura. Esses 13 cm fazem uma diferença dramática na caminhada do robô. Com pernas curtas, o DyRET é estável, mas lento, com um centro de gravidade baixo. Em seu modo mais alto, o DyRET é mais instável enquanto caminha, mas seu passo é muito mais longo, permitindo-lhe viajar mais rápido e passar por cima de obstáculos.
O DyRET também possui sensores para monitorar no que está caminhando. Cada um dos pés do DyRET tem um sensor de força que pode sentir o quão duro é o solo. Uma câmera 3D aponta para o solo entre as pernas dianteiras do DyRET para estimar o quão acidentado é o solo.
Aprendendo a se adaptar
Quando o DyRET está caminhando, ele detecta continuamente o ambiente por meio de seus pés e da câmera 3D. Quando o robô detecta uma mudança nas condições do solo, ele pode mudar para o melhor comprimento de perna. Mas como o robô sabe qual forma corporal funciona melhor?
Exploramos duas maneiras de o DyRET aprender a melhor configuração de perna para diferentes situações: um em ambiente controlado, outro em ambientes internos com superfícies conhecidas e outro teste externo em ambientes reais.
Nos testes controlados, o DyRET caminhou dentro de caixas de cerca de 5 metros de comprimento contendo diferentes superfícies de caminhada: areia, cascalho e folhas de fibrocimento duro. O robô caminhou sobre cada material em cada uma das 25 configurações de pernas diferentes para registrar a eficiência de seu movimento. Com esses dados, foi testada a capacidade do robô de detectar automaticamente uma mudança na superfície de caminhada dentro das caixas e de escolher a melhor forma corporal.
Embora os experimentos controlados tenham mostrado que o DyRET poderia adaptar seu corpo com sucesso às superfícies em que já havia pisado, o mundo real é um lugar muito mais variável e imprevisível. Mostramos que esse método pode ser estendido a terrenos invisíveis estimando a melhor forma corporal para qualquer superfície que o robô encontrar.
Em nossos experimentos ao ar livre, DyRET usou um modelo de aprendizado de máquina, semeado com o conhecimento sobre a melhor configuração de perna para uma determinada combinação de dureza e rugosidade do terreno tirada dos testes controlados. Conforme o robô anda, ele continuamente prediz a melhor forma corporal para o terreno à medida que o encontra, enquanto atualiza seu modelo com medições de quão bem ele pode andar. Em nossos experimentos, as previsões do DyRET melhoram à medida que ele caminha, permitindo que gere movimentos eficientes rapidamente, mesmo para terrenos que nunca viu antes.
Robôs que mudam de forma são o futuro?
DyRET explora a ideia de “cognição incorporada” em um robô: isto é, que o corpo de hardware de um robô pode ser usado para resolver problemas em colaboração com seu cérebro de software, vinculando-os estreitamente ao ambiente. Em vez de o corpo do DyRET ser uma restrição ao seu movimento, ele próprio é uma forma adaptativa de resolver problemas em ambientes desafiadores.
Isso é incrivelmente benéfico, especialmente quando não podemos prever as condições ambientais exatas de antemão, o que torna a escolha de uma única forma “boa” de robô muito desafiadora. Em vez disso, esses robôs se adaptariam a uma ampla variedade de condições ambientais por meio da mudança de forma.
Nossa prova de conceito tem implicações poderosas para o futuro do design robótico, desbloqueando ambientes atualmente impossíveis que são muito desafiadores e variáveis. Futuros robôs que mudam de forma podem ser usados no fundo do mar ou para missões de longo prazo no espaço.
David Howard e Charles Martin para SingularityHub.
Confira também nosso artigo sobre robótica educacional e como ela é importante para este novo cenário.